Phase-1
Phase-1 Baseline Instability Study
Quantitative evaluation of uncontrolled quadrotor rotational behavior under wind disturbance injection.
- High angular velocity variance
- Frequent instability spikes
- Underdamped roll and pitch
- No disturbance rejection
E[||ω||]High
Var(||ω||)High
N_spikes≫ 0
ConvergenceNone
High
Mean ||ω||
High
Var ||ω||
> 1.0 rad/s
Max Spike
Frequent
Spike Count
Poor
Damping
None
Convergence
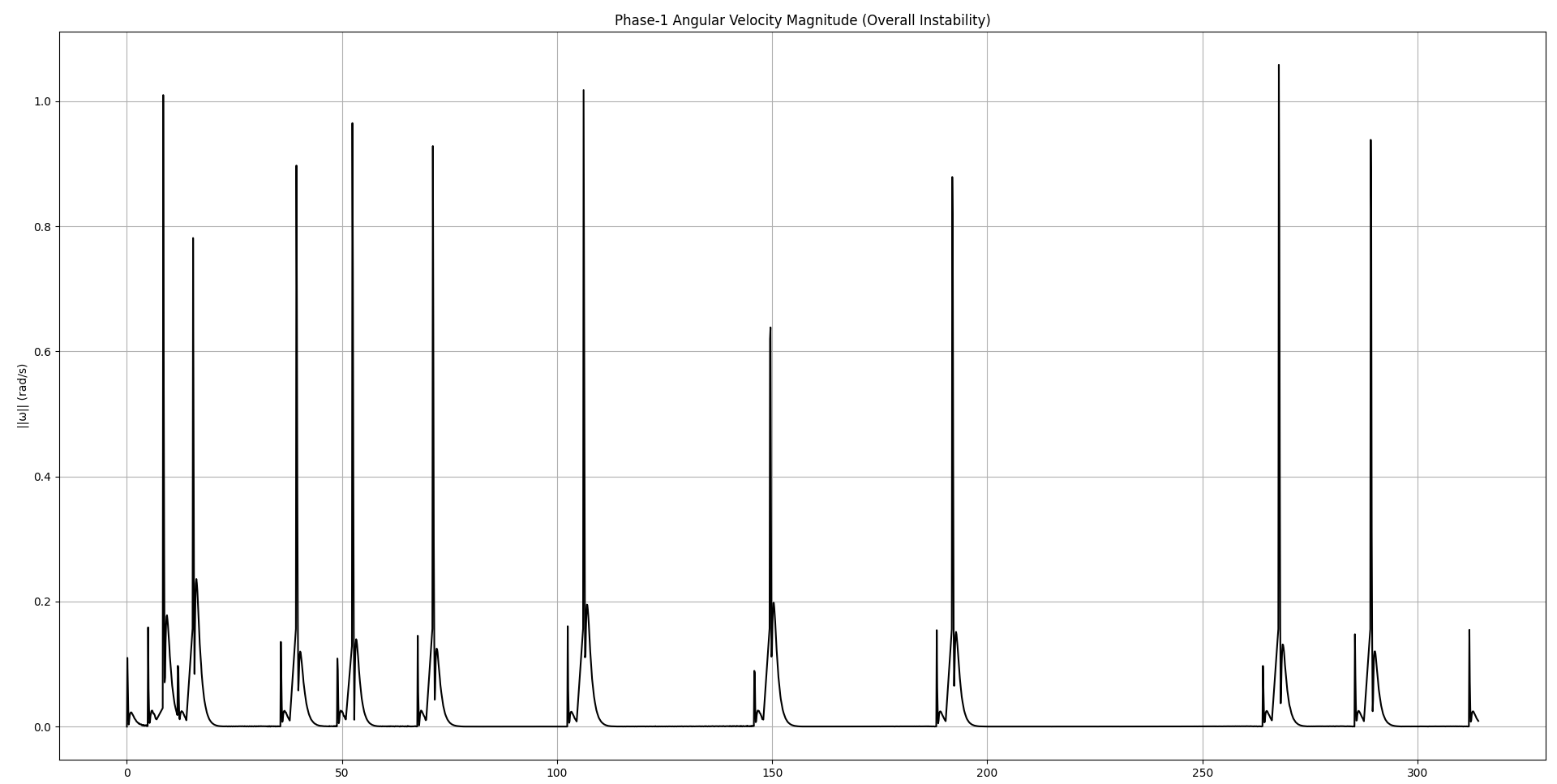
Total Rotational Instability Over Time
Uncontrolled Rotational Response
- • Multiple bursts > 1.0 rad/s
- • Large corrective oscillations
- • No smooth stabilization behavior
Var(||ω||) is high
E[||ω||] is largeSystem reacts to wind but does not damp oscillations.
E[||ω||] is largeSystem reacts to wind but does not damp oscillations.

Per-Axis Rotational Breakdown
Axis-Level Instability Characteristics
- • Wind induces tilt
- • Roll & pitch overshoot significantly
- • Corrective torques amplify oscillation
Underdamped rotational responseBehavior resembles a poorly tuned PD controller.
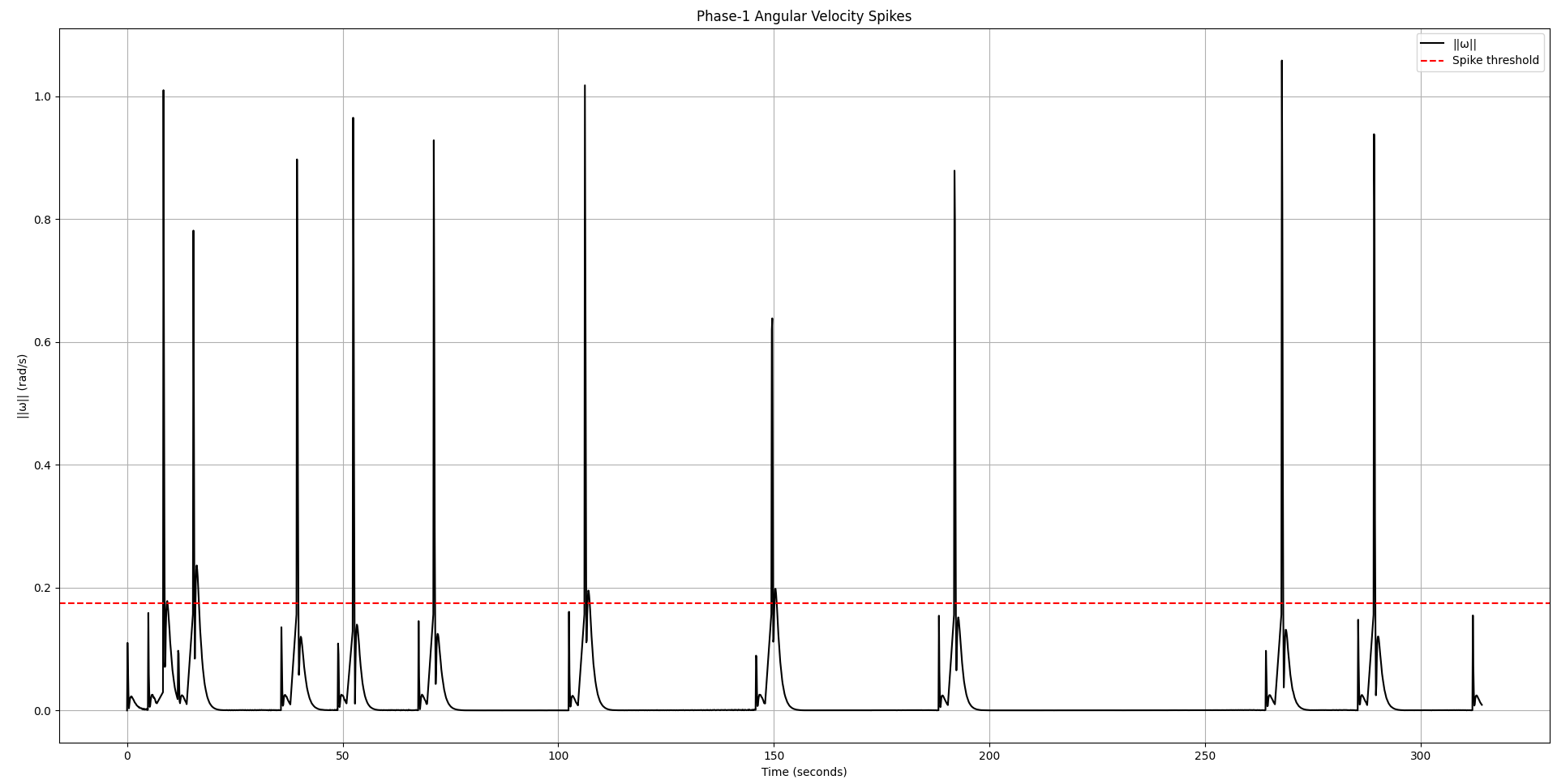
Frequent Threshold Crossings Over Time
Instability Event Frequency
- • Frequent threshold violations
- • Dense spike regions
- • System cannot remain within safe angular envelope
N_spikes ≫ 0Where N_spikes = count(||ω|| > ω_threshold)
I =
1T
∫‖ω(t)‖² dtHigh instability integral represents high rotational energy and no convergence.I_Phase1 is large
Phase-1 Engineering Verdict
Phase-1 demonstrates uncontrolled nonlinear rotational dynamics under wind disturbance, characterized by high angular velocity variance, frequent spike events, and absence of convergence behavior.
- ✖ Cannot suppress rotational spikes
- ✖ Exhibits high oscillatory behavior
- ♦ Requires nonlinear disturbance rejection control
Wind Injection Uncontrolled Response
Phase-1
Baseline Instability
Baseline Instability
➔
Phase-2
Quantified Improvement
Quantified Improvement
➔
Phase-3
Multi-Wind Robustness
Multi-Wind Robustness
Phase-2 introduces quantitative validation of stabilization improvement across repeated disturbance injection trials.