Phase-3
Stochastic Multi-Wind Robustness
Policy trained under aggressive wind randomization to achieve disturbance-invariant stabilization.
- Trained for 600k timesteps
- Stochastic wind injection
- Aggressive disturbance curriculum
- PPO-based nonlinear stabilizer
Robustness Metrics
Stability Score (Calm)≈ 91+
Stability Score (Mixed)≈ 89+
Stability Score (Strong)≈ 86+
Convergence✓
Policy Collapse✗
Early Strong Wind Evaluation — Policy Failure
Critical Failure Event
Initial Strong Wind Instability
- • Strong stochastic wind exceeded control envelope
- • Angular velocity spikes grew uncontrollably
- • Rotational instability led to crash
supt ||ω(t)|| → UnboundedAngular velocity diverges — policy fails to contain rotational dynamics.
Consequence
This failure triggered aggressive retraining under randomized wind regimes — the foundation of Phase-3.

Behind the Training
Aggressive PPO Training Curriculum
- • Randomized wind magnitude & direction
- • Stochastic episode sampling
- • Reward shaping for angular damping
- • Penalized rotational variance
- • Penalized energy spikes
Reward ∝ − (||ω||² + Var(ω) + |Δp|)Reward penalizes rotational energy, variance, and positional deviation simultaneously.
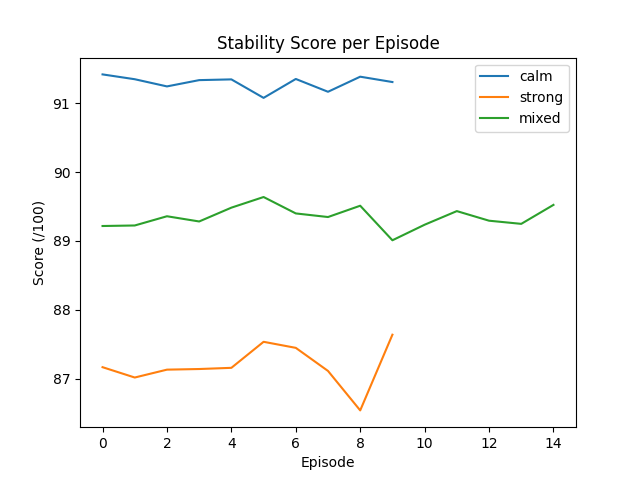
Stability Score per Episode — Calm / Mixed / Strong
Core Evidence
Cross-Regime Generalization
Calm≈ 91–92
Mixed≈ 89–90
Strong≈ 86–87
Key Observation
No degradation trend across wind intensities. The policy maintains >85 stability across all regimes. That is robustness.
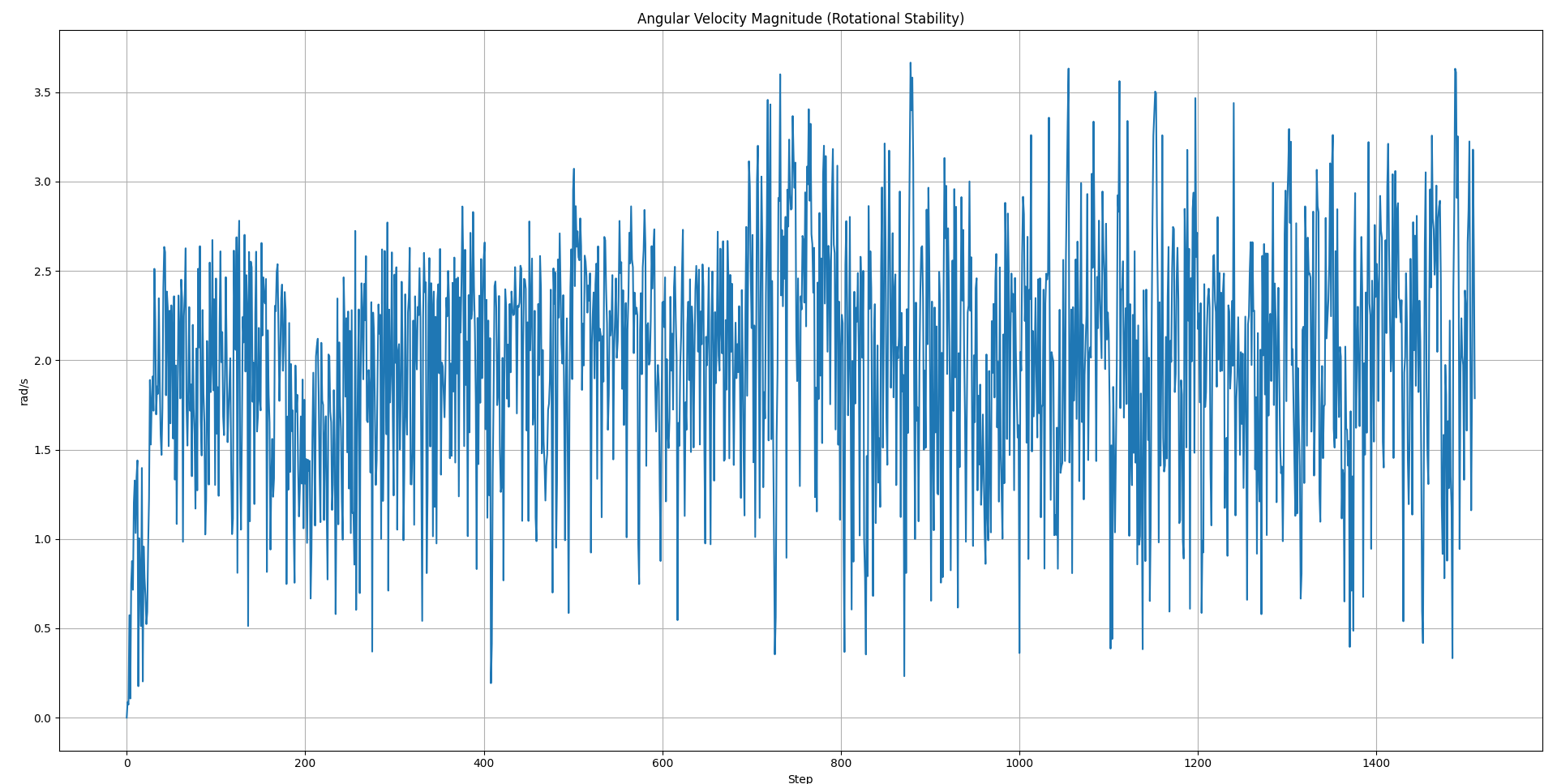
Angular Velocity Magnitude Over Time
Rotational Stability — Magnitude
Bounded Angular Energy
- • Spikes bounded — no runaway amplification
- • No exponential growth in rotational energy
- • Energy dissipates after disturbance events
supt ||ω(t)|| < ω_maxAngular velocity remains strictly within the safe operational envelope at all times.
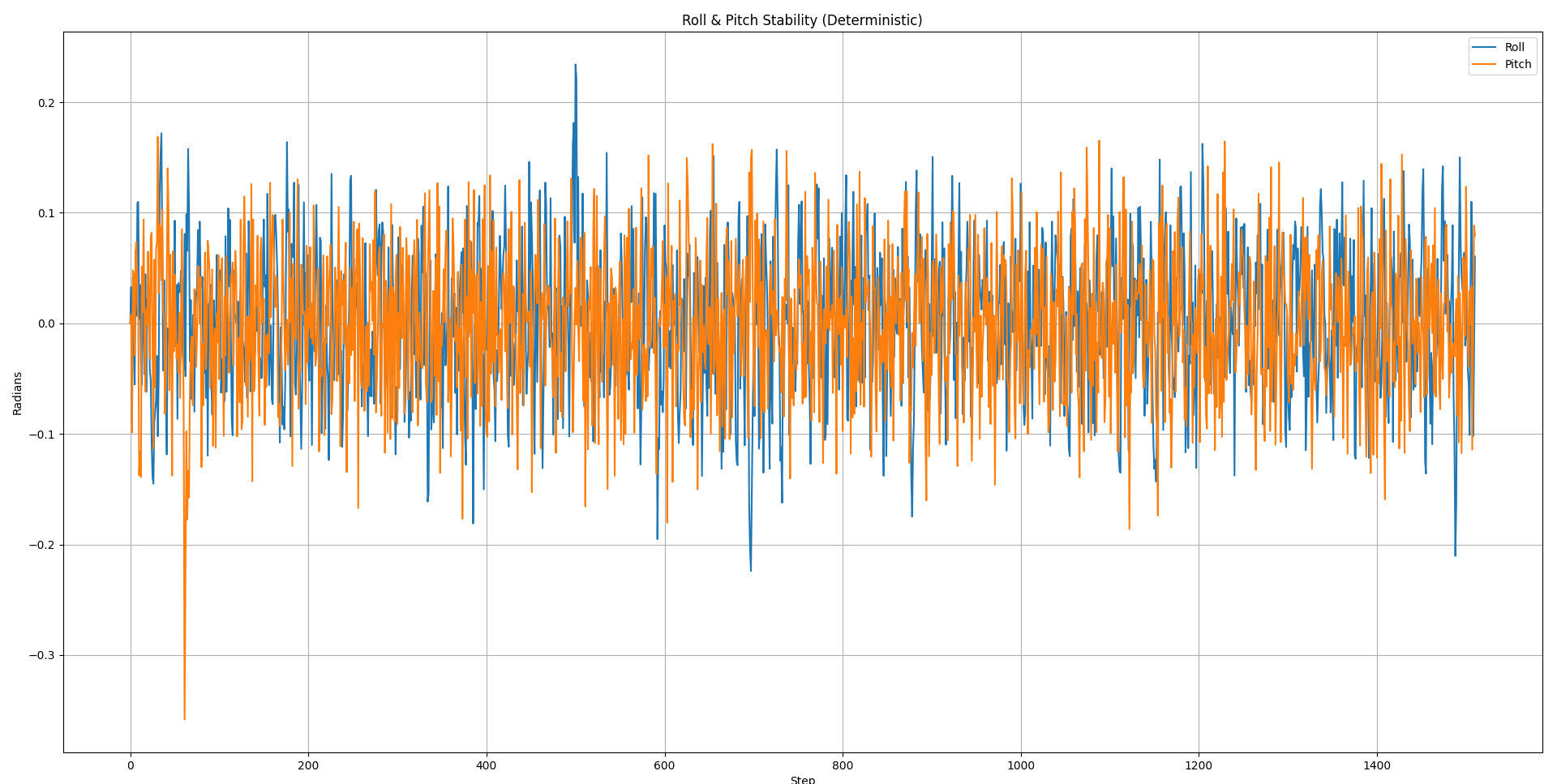
Roll & Pitch Per-Axis Stability
Rotational Stability — Per Axis
Axis Damping Analysis
- • Roll & pitch oscillations rapidly damped
- • Yaw axis structurally stable
- • No cross-axis amplification
Var(ωx), Var(ωy) ↓ | Yaw stableReduced per-axis variance confirms successful damping of roll and pitch dynamics.
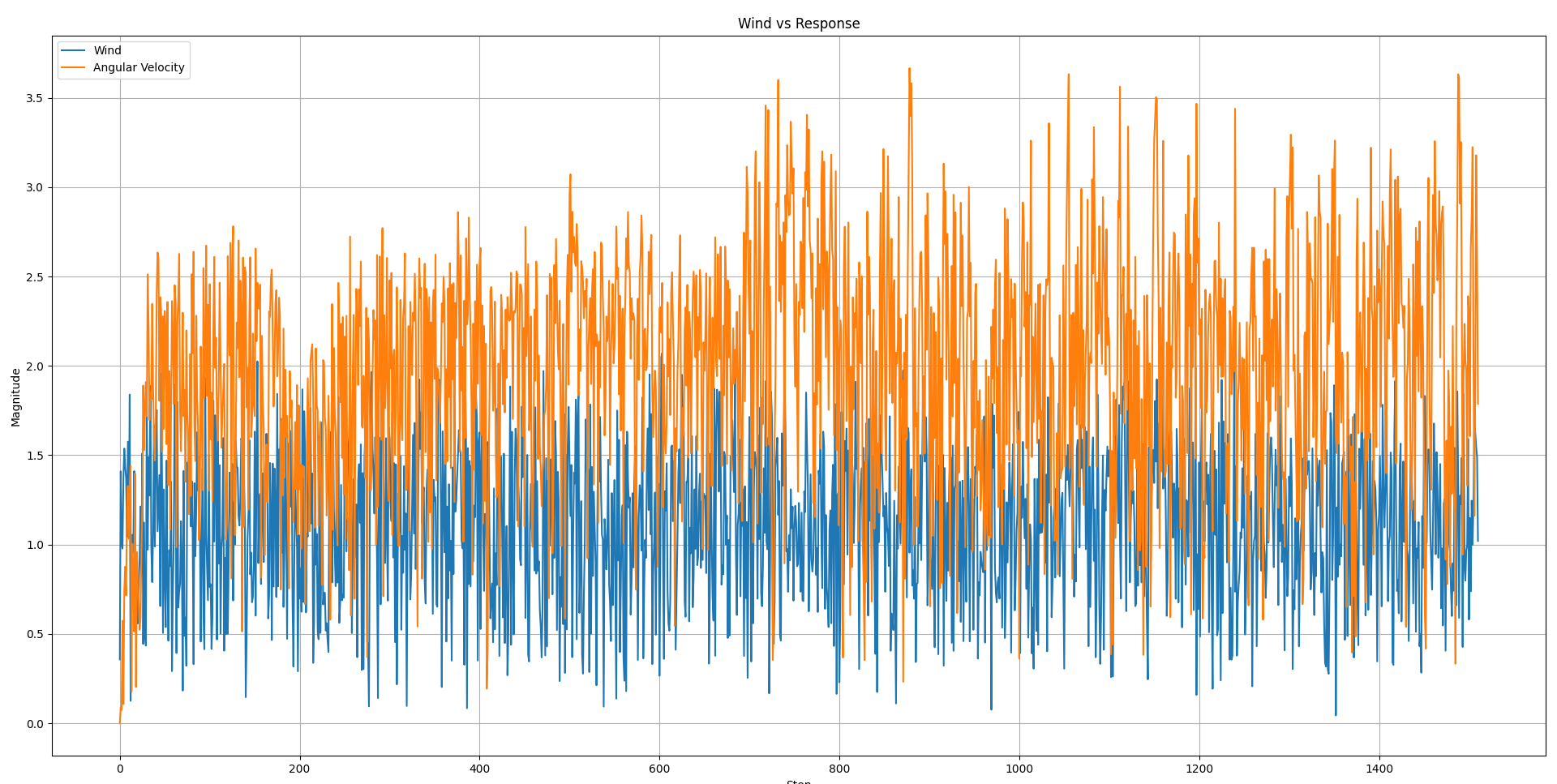
Wind Intensity vs Angular Velocity Response
Disturbance Coupling
Controlled Wind–Response Coupling
- • Wind increases → angular velocity increases proportionally
- • No chaotic divergence at high wind intensities
- • Fast recovery after disturbance spikes
||ω(t)|| ∝ Disturbance magnitudeResponse scales proportionally with input — no nonlinear amplification.
Bounded proportional responseSystem exhibits linear gain characteristic — evidence of learned disturbance rejection.
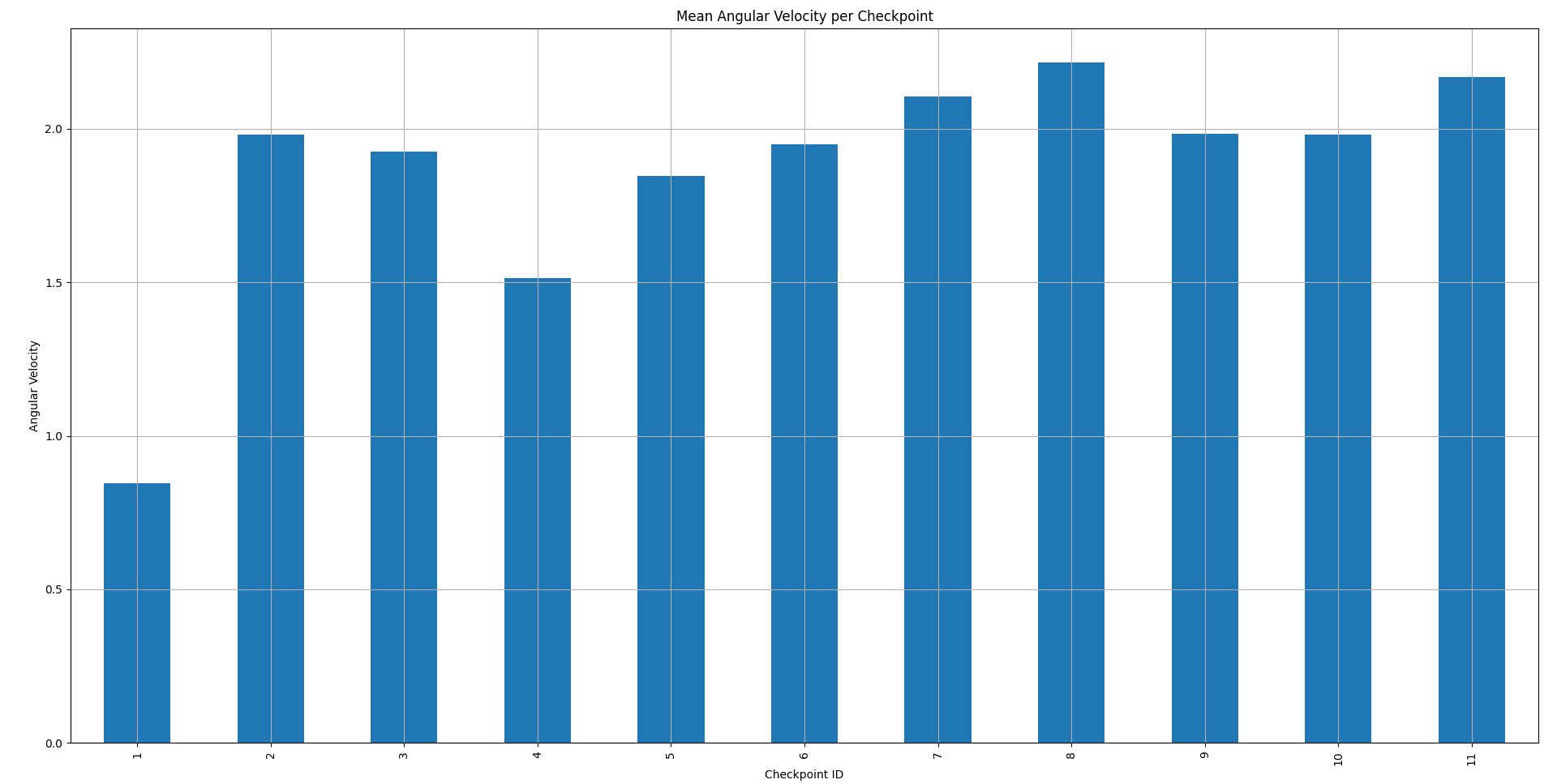
Mean Angular Velocity per Training Checkpoint
Training Convergence
Stable Learning Horizon
- • No instability explosion across checkpoints
- • Angular velocity remains controlled throughout training
- • No policy collapse during long-horizon training
Interpretation
Consistent mean angular velocity across all checkpoints proves stability across the entire 600k timestep learning horizon. No catastrophic forgetting.
PPO Policy Learning
Calm & Mixed Wind Training Session
PPO policy learning stabilization under calm & mixed wind environments
Engineering Verdict
Phase-3 Engineering Verdict
Phase-3 demonstrates learned nonlinear disturbance rejection under stochastic wind injection. The PPO policy achieves bounded angular velocity behavior, consistent stability scores above 85/100 across regimes, and controlled wind-response coupling without collapse.
✓Learned disturbance rejection
✓Generalized across wind regimes
✓Stabilized rotational dynamics
✓Survived strong wind injection
✓No policy degradation
Phase-1
Baseline Instability
Baseline Instability
➔
Phase-2
Quantified Improvement
Quantified Improvement
➔
Phase-3
Multi-Wind Robustness ✓
Multi-Wind Robustness ✓